Cartographica contains a powerful analysis tool for generating Raster layers from vector point data. This tool can interpolate using a number of mechanisms in order to "fill in the gaps" of data based on a selection of algorithms. It should be noted that all of these algorithms are interpolations and you should consider the raster data to be a type of approximation, as opposed to accurate information. However, this tool can be useful for visualizing sparse data sets or data sets whose density varies.
The interpolation system uses the underlying GDAL grid system for its implementation.
For algorithms that use search ellipses, the angle of the ellipse rotation (counter clockwise, zero along the axis) is Angle and the radii of the ellipse are Radius1 (along the X axis at Angle 0), and Radius2 (along the Y axis at Angle 0).
Table 8.5. Interpolate Point Data Algorithms
Interpolation Algorithm | Overview | Parameters |
|---|---|---|
Inverse distance to a power | The inverse distance to a power method uses the weight and smoothing to calculate the grid value. If the ellipse radii (radius1 and radius2) are not set, then every point contributes to the value, based on the inverse of its distance to the grid node. If the ellipse radii are set and Max Points is set, at most that many of the nearest points within the radius are used. If the ellipse radii are set and Min Points is set, the grid node is considered empty if fewer than that many points are found. |
|
Inverse distance to a power with nearest neighbor searching | The inverse distance to a power method uses the weight and smoothing to calculate the grid value. The circle radius (radius) should be set to a non-zero radius. If Max Points is set, at most that many of the nearest points within the radius are used. If Min Points is set, the grid node is considered empty if fewer than that many points are found. |
|
Moving average | The moving average uses a moving search ellipse in which all points are averaged when computing grid node values. Note, that it is essential to set search ellipse for moving average method. If Min Points is set, the grid node is considered empty if fewer than that many points are found. |
|
| Nearest neighbor |
The Nearest Neighbor method takes on the value of the nearest neighbor within the ellipse defined by the Angle, Radius 1 (X axis at angle 0), and Radius 2 (Y axis at angle 0). If the Radius values are both 0, the entire point array is used. If no points are found within the ellipse, the grid node is considered empty. |
|
Linear interpolation |
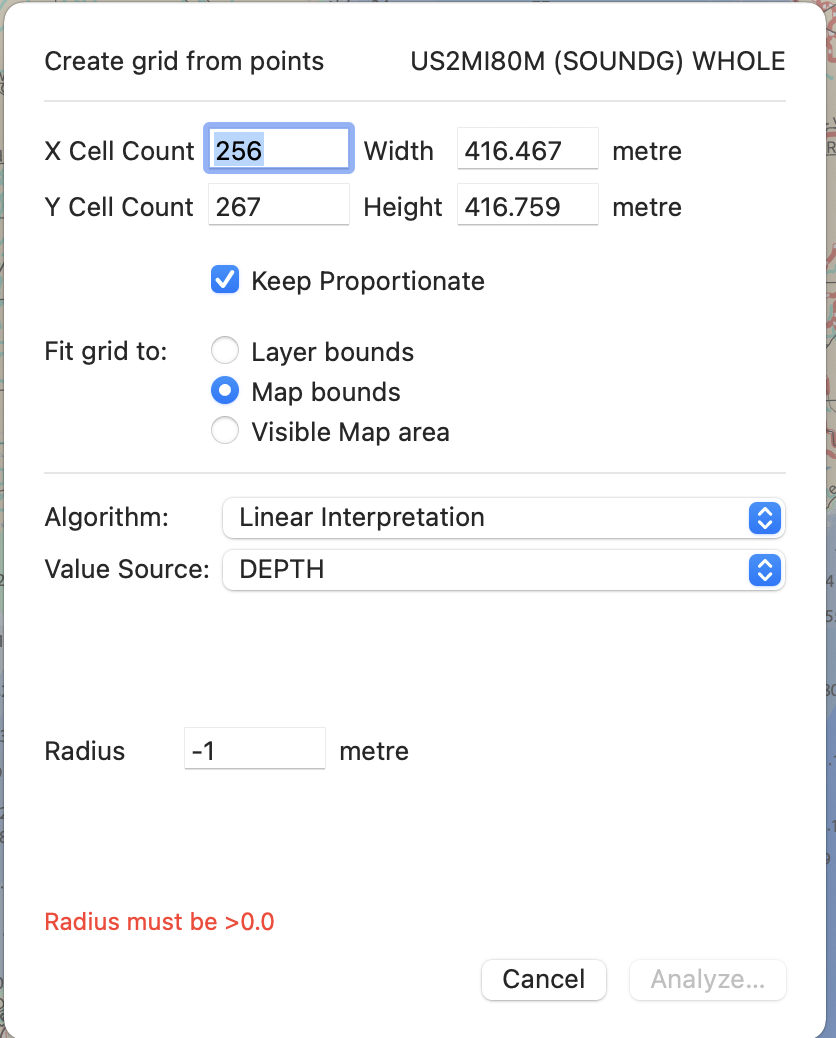
The Linear method performs linear interpolation by computing a Delaunay triangulation of the point cloud, finding in which triangle of the triangulation the point is, and by doing linear interpolation from its barycentric coordinates within the triangle. If the point is not in any triangle, depending on the radius, the algorithm will use the value of the nearest point or the nodata value. If Radius is set to -1, the search distance is infinite. |
|
Interpolating Point Data
Select the layer you want to use as point source.
![[Note]](Graphics/note.svg)
By selecting features within the layer, you can limit the point source to just the selected features.
Choose > .
The Interpolate Point Data sheet appears
Choose from one of the Algorithms (discussed previously in Table 8.5, “Interpolate Point Data Algorithms”)
Make desired changes to the parameters
Click
When complete, a new layer will be added to your map.